pick up
product
仮想空間シミュレーション
「WARXSS®」
交通事故、都市計画、自動運転の課題を、
3Dで再現・比較・検証。
“見える根拠”が、未来の交通社会実装を加速する。
近年、VRやARといった仮想空間技術は急速に進化し、エンターテイメントに留まらず、教育やビジネスの領域でも画期的な解決策を生み出しています。
WARXSS®(ワーキス)は、この仮想空間技術を交通課題の解決に応用したシミュレーションツールです。実在する都市を3D空間に再現し、図面や写真だけでは伝わらないリスクや対策効果を可視化。関係者間の円滑な意思決定と合意形成を支援し、交通事故対策から自動運転の社会実装まで、さまざまなプロジェクトを成果へと導きます。

交通計画における課題
関係者間のイメージの違いは、プロジェクトの遅延やコスト増につながります。従来の図面や写真では伝わりにくい情報を、WARXSS®は可視化することで共有可能にします。
現場で想定される具体的な課題
交通事故対策
-
危険箇所や対策の有効性が、図面や写真だけでは関係者にうまく伝わらない。
-
対策案の比較が「定番の手法」や定性的な議論に留まり、客観的な根拠を示しきれない。
-
警察・地域住民との合意形成に時間がかかり、計画がスムーズに進まない。
まちづくり・都市計画
-
再開発後の交通量や人流の変化を、関係者間で空間的に共有することが難しい。
-
平面図ベースの住民説明会では、完成後のイメージギャップから計画への理解が得られにくい。
-
景観への影響など、多角的な視点での検討が不足しがちになる。
自動運転・特殊車両
-
具体的な走行イメージが湧かず、導入計画が停滞してしまう。
-
安全性への不安を払拭できず、住民や事業者の理解(社会受容性)の醸成が難しい。
-
現実では再現が難しい気象条件や危険シーンでの検証に、膨大な時間とコストがかかる。

WARXSS®とは
RYODENとヴィッツが共同開発した、交通・都市計画分野における「議論」と「合意形成」を支援するシミュレータです。Unreal Engineを活用した高画質な仮想環境により、現実では再現が難しい条件下でも検証を行うことができます。専門的な開発シミュレータとは異なり、関係者間での理解促進に重点を置いています。
自動車開発で用いられる高価で専門的なシミュレータとは異なり、WARXSS®は関係者間のイメージ共有と議論の活性化に特化しています。
デモ動画・ビジュアル事例
マルチ視点
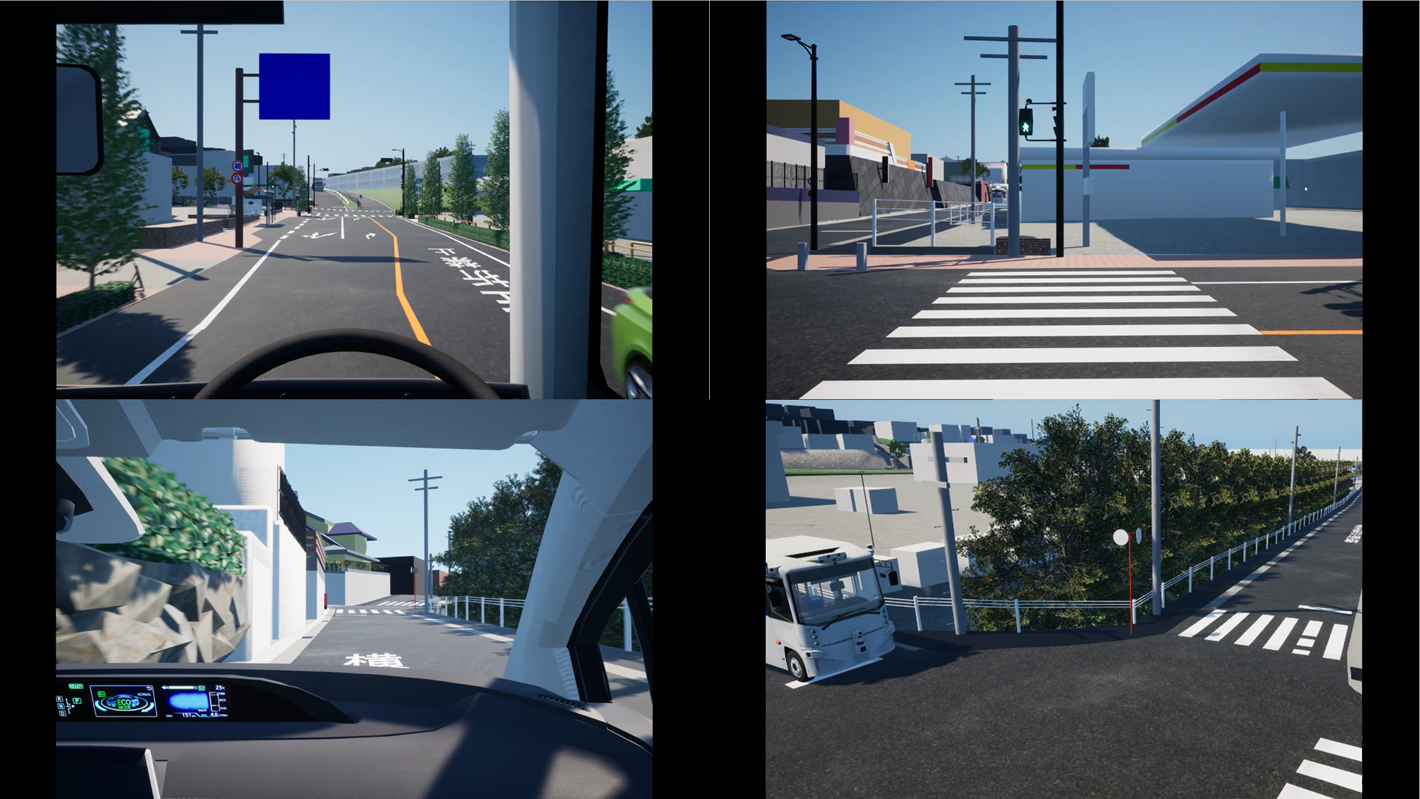
多視点切替による比較動画
運転手目線
歩行者目線
開発用シミュレータとWARXSS®の比較
|
|
開発用シミュレータ |
WARXSS® |
|---|---|---|
|
主目的
|
定量的な開発・検証 |
イメージ共有・議論・合意形成 |
|
価格帯
|
高額 |
低コスト |
|
導入期間
|
長期間 |
短期間(約1ヶ月~) |
|
操作性
|
高度な専門知識が必要 |
専門知識不要・直感的 |
|
提供形態
|
パッケージ製品 |
柔軟なカスタマイズ |
特徴:柔軟なカスタマイズ性。既存資産を活かした最適なシステム構成提案が可能であり、他社ツールとのI/F構築も得意としています。
WARXSS®主な機能と保有技術
|
カテゴリ
|
主な技術・機能 |
|---|---|
|
ロケーションモデル
|
一般道、高速道路、テストコース、駐車場、OpenStreetMapからのインポート など |
|
天候・環境条件
|
晴れ、小雨/大雨、降雪/積雪、太陽位置自動変化による時間経過の再現 など |
|
3Dオブジェクト
|
お客様保有のCADデータインポート、車両・建物の外観再現、簡易的な障害物配置 など |
|
センサーモデル
|
LiDAR、ミリ波レーダー、カメラ、IMU など、各種センサーの挙動シミュレーション |
|
他社ツールとの連携I/F
|
MATLAB/Simulink、Windowsアプリ、Synopsys社製ツール、Vissim、ROS |
WARXSS®技術を応用したユースケース
シミュレーションが、計画の精度と納得度を飛躍的に高めます。
本来、WARXSS®は自動運転や都市交通の課題を中心領域としていますが、仮想空間シミュレーション技術を応用し、ヴィッツの技術と組み合わせることで、多様な周辺領域の課題解決に貢献することができます。
1. 自動運転システム検証
自動運転に求められる安全性検証を効率的に行うことができます。現実では再現が難しい悪天候や夜間、危険シーンを仮想環境上に模擬し、繰り返し検証が可能です。対象システムと連携したフィードバック検証にも対応し、多様な状況を網羅的に評価できます。これにより、開発現場の検証精度を高め、プロセス全体の効率化に寄与します。
2. MaaS事業・まちづくり
公共交通と自動運転車両を組み合わせるMaaS事業や都市計画において、交通流シミュレータとの連携により混雑度予測が可能です。バス停や横断歩道の配置パターン比較、景観変化のシミュレーションなども行えます。住民説明においても完成後のイメージを直感的に提示することができ、利便性と安全性の両立を支援します。
PLATEAUデータと交通流シミュレータを活用することで実都市に近い交通環境の再現と分析が可能です。
3. 交通事故対策
危険な挙動の再現による事故原因の多角的な分析や、対策案のBefore/After比較、車両速度に応じた停止距離の可視化などが可能です。警察や住民への説明においても、誰にでも分かりやすい「見える根拠」として、円滑な合意形成を促進します。
気象・道路データと連携することで、より実証的な事故再現が可能です。
4. 特殊車両(農業・建設・工場)
農業・建設・工場といった分野では、作業環境や運用条件が一般的な交通とは大きく異なります。WARXSS®は交通・都市計画領域で培った「環境を再現し、関係者間で共有する仕組み」を応用することで、特殊車両の検証にも活用可能です。
サービスに関連する事例・実績
無人自動運転サービスカーの安全性検証向け活用事例
自動運転乗務員教育・人材育成
自動運転サービスカーの多くは「レベル2」(人が必要に応じて操作を引き継ぐ)から導入を始め、無人走行の「レベル4」を目指していきます。そのため完全無人になるまでの乗務員は、自動運転の支援機能や限界理解が求められます。 WARXSS®は、VR視点を通じて、乗務員が事前に運行イメージを持てる教材として活用できます。 これにより、運転経験の少ない新人から、従来のバス運転に慣れたベテランドライバーまで、様々な経歴の乗務員に対し直感的かつ効果的な教育が可能となり、安全で円滑な運行体制の構築を支援します。

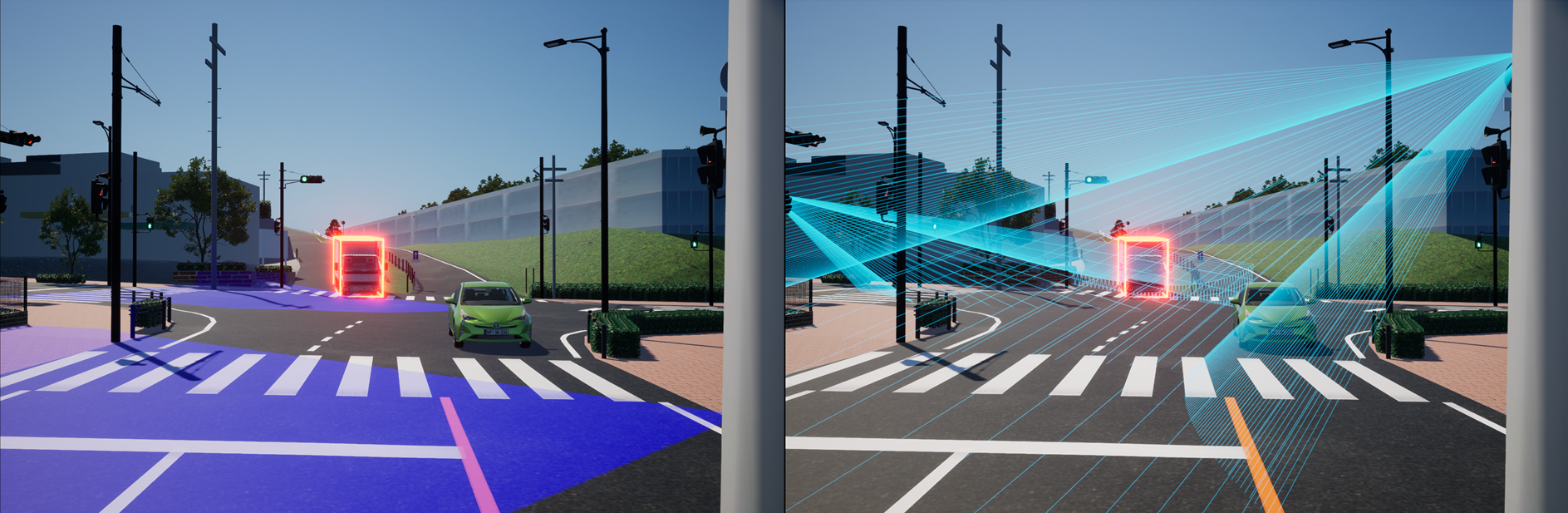
センサー可視領域シミュレーション
LiDARやカメラ、レーダーの検知範囲・死角を3Dで表示。センサーが検知した歩行者・車両を強調表示し、検知状況を直感的に確認できます。
無人自動運転サービスの普及を目指す国の先進プロジェクトで活用
「RoAD to the L4」へ参画する日本自動車研究所(JARI)より委託をうけ 実際に自動運転バスに乗車する乗務員への教育や合意形成のため、ひたちBRT(テーマ2)と柏の葉地域(テーマ4)でWARXSSが活用されています。
建設コンサルタントとの協業による地域展開
株式会社福山コンサルタントと協業し、自治体向けに自動運転導入計画からルート設定、リスクアセスメント、実証支援までを提供しています。
シミュレーションによる客観的な検証を通じて、
交通・都市計画や自動運転の社会実装を支援します。
本サービスに関する詳細は、当社までお問い合わせください。
